
Mettre la robotique et les CND au service du nucléaire
FUZZY LOGIC / VISIONIC
parDéveloppée par Fuzzy Logic et Visionic pour Framatome Intercontrôle, la plateforme Primus (Platform for Robotic Inspection and Maintenance for Unstructured Settings) se présente comme un système de contrôle non destructif (CND) robotisé d’infrastructures nucléaires.
 La plateforme Primus se présente comme un ensemble logiciel et matériel utilisable par des opérateurs de CND non roboticiens… ce qui présente un « facteur majeur de différenciation par rapport aux solutions existantes sur les marchés de la robotique et des CND », selon les concepteurs. Son fonctionnement est simple : la première étape consiste à modéliser l’environnement, tel qu’il est au moment de l’inspection. Des éléments complémentaires éventuels susceptibles de gêner la trajectoire sont alors intégrés dans cette étape de modélisation, la simulation du processus avant l’inspection sur site est alors complète.
La plateforme Primus se présente comme un ensemble logiciel et matériel utilisable par des opérateurs de CND non roboticiens… ce qui présente un « facteur majeur de différenciation par rapport aux solutions existantes sur les marchés de la robotique et des CND », selon les concepteurs. Son fonctionnement est simple : la première étape consiste à modéliser l’environnement, tel qu’il est au moment de l’inspection. Des éléments complémentaires éventuels susceptibles de gêner la trajectoire sont alors intégrés dans cette étape de modélisation, la simulation du processus avant l’inspection sur site est alors complète.
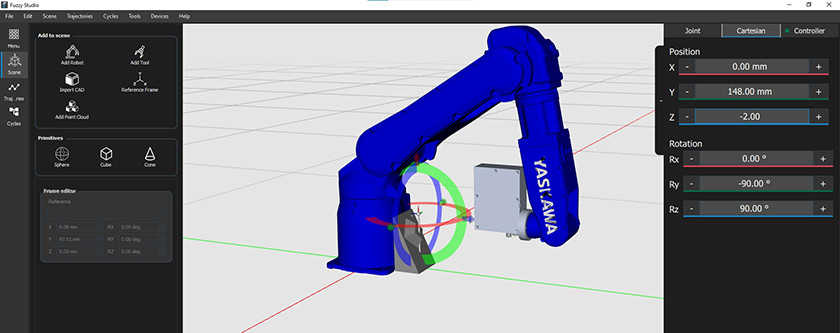
À la deuxième étape, un robot est mis en place à proximité des zones de soudure de la tuyauterie. L’exigence de précision de déplacement de la sonde d’inspection demande l’utilisation d’un robot pour obtenir une orientation et un positionnement précis. Grâce au logiciel mis au point par Fuzzy Logic, Fuzzy Studio, le robot peut être rapidement mis en place par les opérateurs, sans nécessiter d’importantes précisions de positionnement sur la tuyauterie. Les capteurs 3D intégrés sur le robot permettent de recaler rapidement et simplement le robot dans son environnement réel. Les trajectoires peuvent être déterminées en quelques secondes et quelques clics de souris. La combinaison entre la trajectoire complexe calculée par Fuzzy Studio et le scan 3D de la structure de la soudure par Visionic génère la trajectoire d’inspection adaptée à la surface réelle. La dernière étape consiste en l’inspection de la soudure par ultrasons.
EQUIP PROD • N°134 Mars 2022